GAMES104-NOTE4
1. 引擎中的GamePlay玩法
GamePlay is Everything
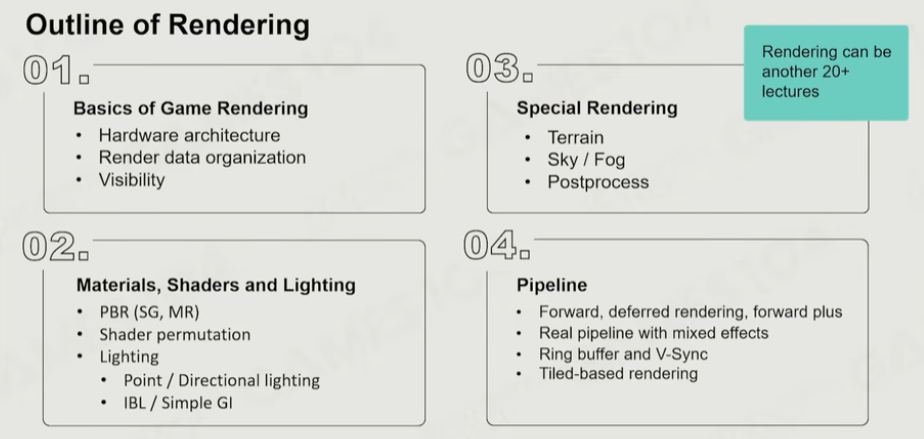
1.1 总览
• Event Mechanism
• Script System
• Visual Script
• Character, Control and Camera
GamePlay的挑战
- 各个子系统之间的协作
- 对于一些游戏中,可能存在各种类型玩法
- 如何针对市场情况,做出快速迭代
1.2 Event Mechanism
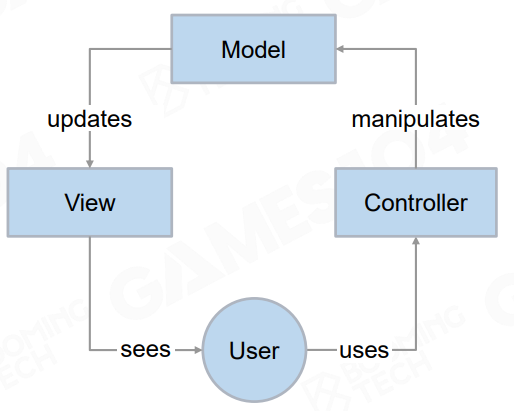
- Publish-subscribe Pattern
- 发送者 -> 事件注册到Dispatcher
- Dispatcher送到各个GO中
- GO返回Callback
因此需要三个组件:
组件1: Event Definition - 这里的问题是,游戏的玩法多样性导致无法从程序层面预先定义好类型。UE的解决方案下是允许自定义类,生成可编辑的界面。
- 但另一个问题是,这样还是会需要重编译代码,对于UE来说,允许一种C++代码编译出的DLL的注入机制。
组件2:Callback Registration
预先注册一个callback函数句柄,由某个时刻被Invoke。
- 问题,生命周期的问题,callback安全性问题,在invoke原指针地址已经被回收,wild point
- 强引用的做法:callback注册在对象不可能销毁! 这样内存可能会越来越大。。
- 弱引用的做法:对象可以被销毁,但Invoke时,进行判定!
组件3:Event Dispatching
- 立即模式,父类的函数会一直等到callback后才能继续执行
问题,多同步的情况难以处理,对于游戏环境的添加特效,如果加载的事件放成立即,则会花费大量的事件在发送事件 - 消息队列, 先放到队列中,在未来某个时间点按顺序(或优先级)执行
-
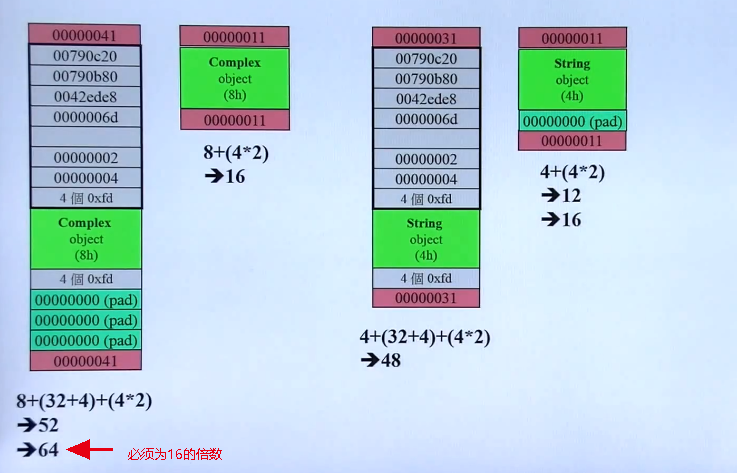
需要解决Event序列化和反序列化的问题,利用反射的机制,将Event与内存块之间进行相互转换。
-
进一步的优化Event的内存,用Ring Buffer的方法,通过移动指针来管理内存池。
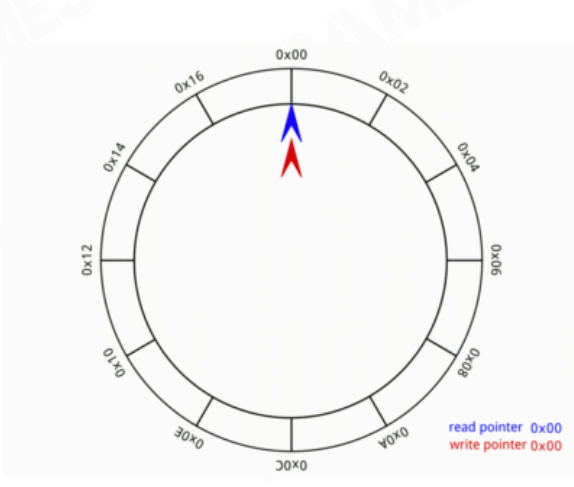
-
消息队列进行分类, 对于复杂的Event来说,做出多个Dispatcher,多个Queue。如Net Event Queue, Combat Event Queue等,加强处理效率,也更易维护。
-
问题1, 队列无法保存顺序问题
-
问题2, 时效性问题,需要至少等一帧,无法立即处理。 如对于ACT游戏来说,实时性要求较高的情况。
Event不建议添加优先级机制,这会导致耦合度的增加,同时也不符合dispatcher的优势,更难以处理并行化的设计。设置了优先级就会包含了大量的假设,也加大了与dispatcher的耦合度。
1.3 Game Logic的语言
-
编译型语言构建游戏逻辑
问题1: 更新迭代困难,每次修改都要重编
问题2: 使用门槛高,设计(非开发)人员几乎无法参加 -
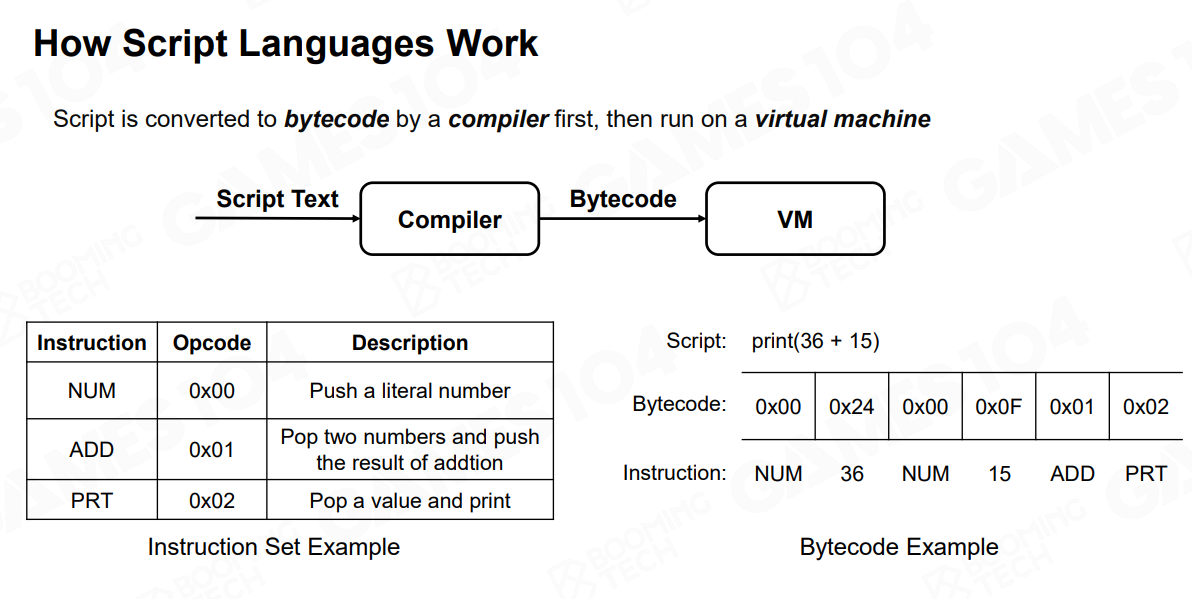
脚本语言,解释型语言
在一个虚拟机的环境中运行
-
脚本管理系统
方案一: Native语言控制游戏主世界,拥有更高的性能。
方案二: 使用脚本语言控制
实际情况下,在重度脚本依赖的游戏中,GO的创建管理多数在于脚本中,因为游戏逻辑中GO的使用控制是相对更多的,而脚本主控的也是游戏逻辑部分,编译型语言则是提供基础功能的接口。
脚本语言的缺点是慢,但借助JIT(just-in-time),一边运行一边编译,以此种方式优化整个性能,甚至可以超过编译语言。
魔兽世界- 使用LUA
1.4 Visual Scripting
可视化编程语言
引擎的本质是生产力工具
- 将整个脚本语言转为可视化的过程
- 难点:主要还是团队协作的问题,这里有规范性的问题,debugger机制,手动整理过程低效耗时
- 本质上,就是可视化的脚本,需要能与脚本之间互相转换,但与脚本并不是一个替代关系。而更好的是一个互补的情况
1.5 3C系统
Character, Control & Camera
形成了游戏的体验的核心
- Character: 首先就是Movement,对于3A游戏来说,移动会有很多的细节。 其次是与环境的互动。一般来说由 状态机来实现。
- Control: 针对不同的设备的Input做出不同的对应响应,同时也需要反馈机制,另外对于一些ACT游戏,还需要设计不同的按键组合,这里有Chords,同时按下某些键,触发一个独特的行为,有Key Sequences,保留一段玩家的操作记录,以触发一个游戏行为。
多数的FPS游戏都配有一个吸咐系统,如果不做吸咐的话,由于操作的延迟可能会有100MS+,导致难以操作。
- Camera: 当角色在跑动走动时,相机也会随着发生变化。非常重要的一方面,根据生物学的原理,让相机表达出更好的主观感受。
2. AI
2.1 Outline
AI Basic
• Navigation
• Steering
• Crowd Simulation
• Sensing
• Classic Decision Making Algorithms
Advanced AI
• Planning and Goals
• Machine Learning
2.2 Navigation
导航系统分为 Map representation -> Path finding -> Path smoothing
2.2.1 Map representation - Walkable Area
确定所有可以去的区域
表达Walkable Area的格式:
- Waypoint Network 路点网络
- Grid
- Navigation Mesh
- Sparse Voxel Octree 空间八叉树
有些情况需要在游戏中使用多种格式
- Waypoint Network
- 找最近的点。Find the nearest points to get on and off the network
- Plan the path on the waypoint network
实现容易,但限制性较多,路点选择需要手动介入
-
Grid
统一标准划分,统一的格子形状。
实现容易,更易于更新,统一的数据格式。缺点是存储空间造成浪费,在Grid中移动时,可能会造成较严重的cache miss,另外实现桥路和地下叠加路线较为复杂,像素的精准度问题。 -
Navigation Mesh
解决重叠路面问题,对比waypoint,这里使用的是面覆盖的方式,且支持3D walkable surface。更加精准,更快的寻路,动态性更好。但生成较为复杂,对于3维空间来说无法处理
使用Polygon,且必须得是凸Polygon(Convex Polygon),而不是凹Polygon(Concave Polygon)。
原因:
- Pathfinding generates a series of polygon
(Polygon Corridor) need to walk through,寻路形成一系列的多边形走廊,可能出现在多边形之外。 - Convexity guarantees the final path is limited in
the polygon and two adjacent polygons have only
one common edge (Portal)。 两两个多边形之间仅有一个共享的边
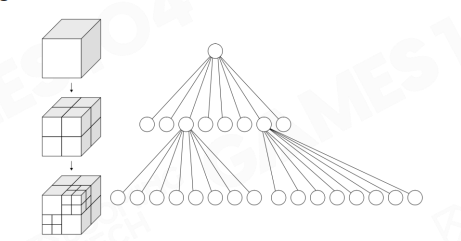
- Sparse Voxel Octree
对于空战游戏,就可以使用八叉树的分类方式处理3维空间。问题是存储的空间要求较高,寻路较为困难
2.2.2 Pathfinding
所谓寻路的目标,1是找到一条可通达的道路,2是尽可能的找到相对近的路。
-
广度优先算法
较费时 -
深度优先算法
较费时 -
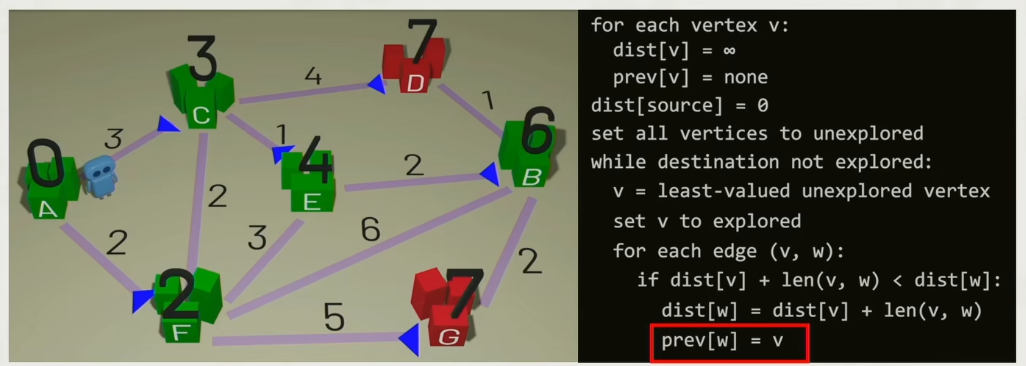
Dijkstra
每次遍历所有相邻的未访问过的点,找出与旧的点距离最短的点,直到找终点
-
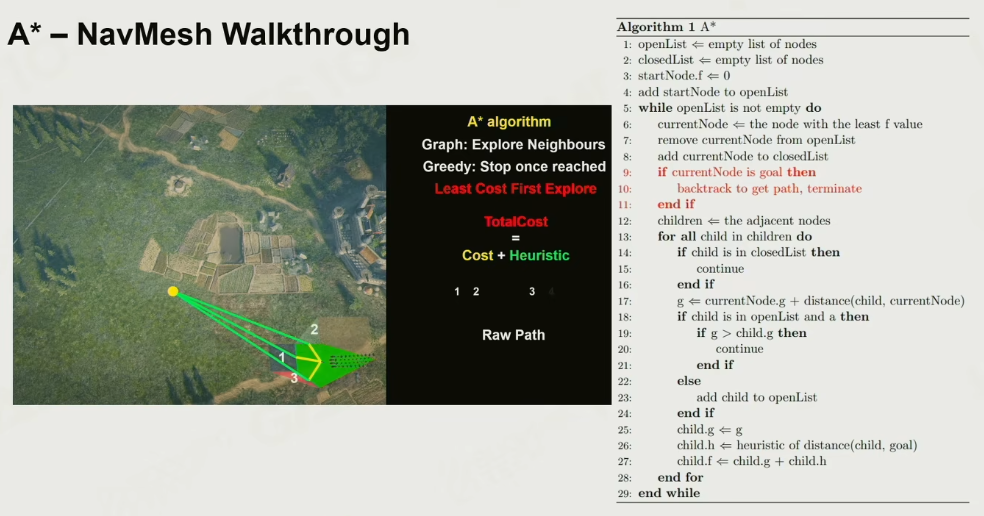
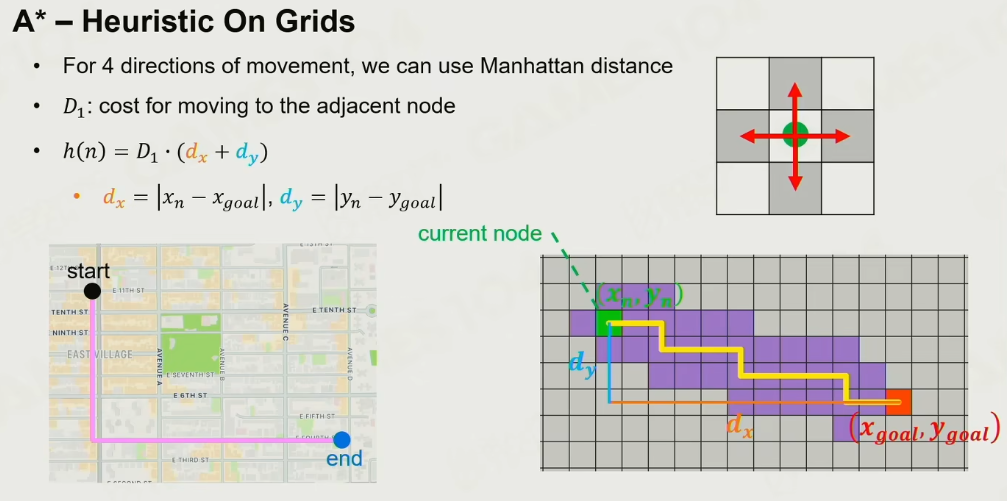
A星
基本基于Dijkstra的思路,额外加入一个新的启发函数,cost等于source+启发
这里的启发函数可以理解为方向,如两点之间的直线距离,任意路径点与此直线距离的得到最终的cost.
Grid的启发算法:
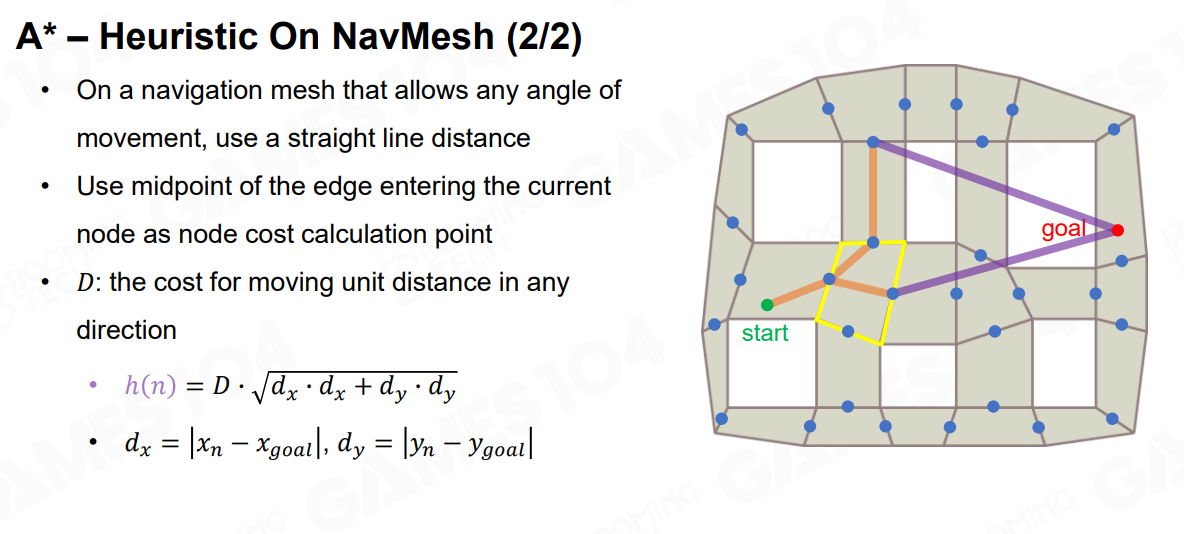
NavMesh的A星启发算法:
-
一般使用边线的中点
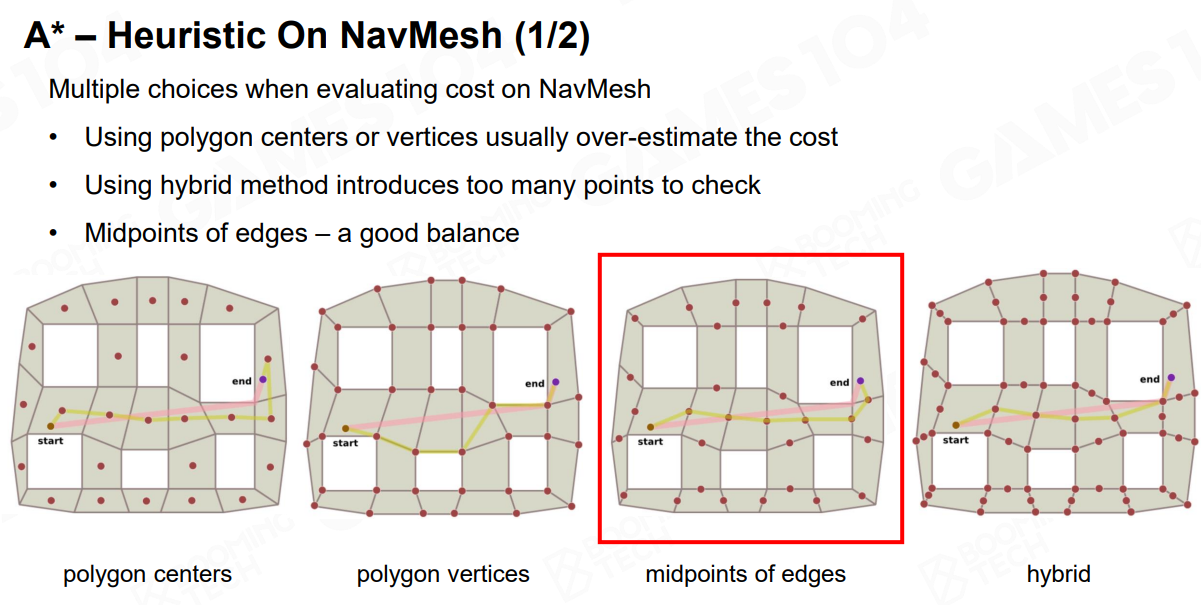
-
计算欧拉距离
Heuristic的行为:
h(n) 过低,更慢,但容易找到最短路径,过高,更快点达到终点
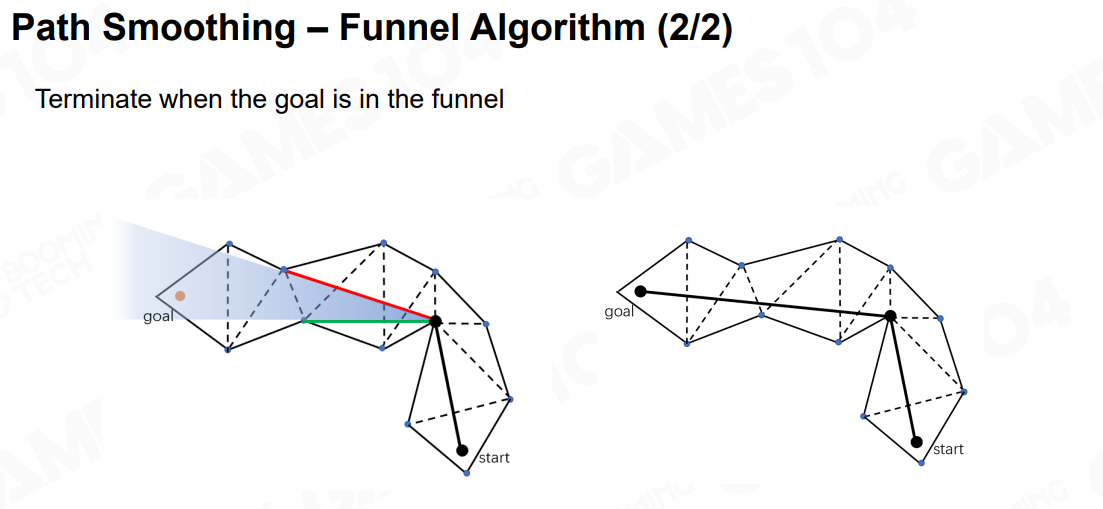
2.2.3 Path smoothing
让AI走得更真实更自然
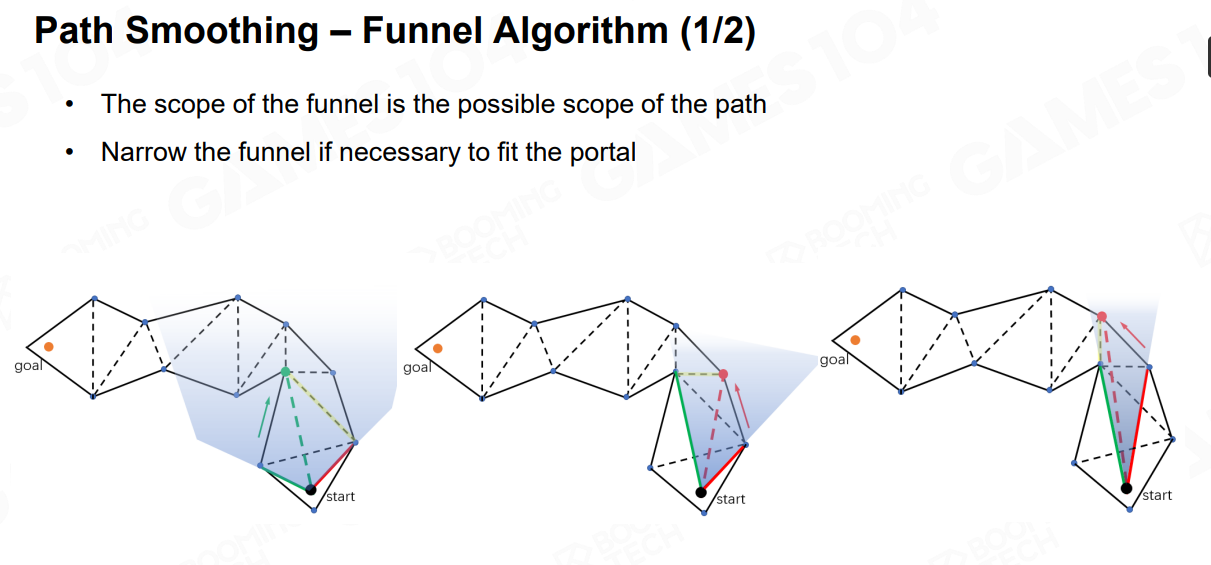
- Funnel Algorithm
类似于人走路的算法实现,先从一个点看向通道,找出相邻边的多边形,再判断是否与能完全包裹多边形,是则往下个多边形减少范围。 否则找到与下个多边形最近的边来减少范围查找。
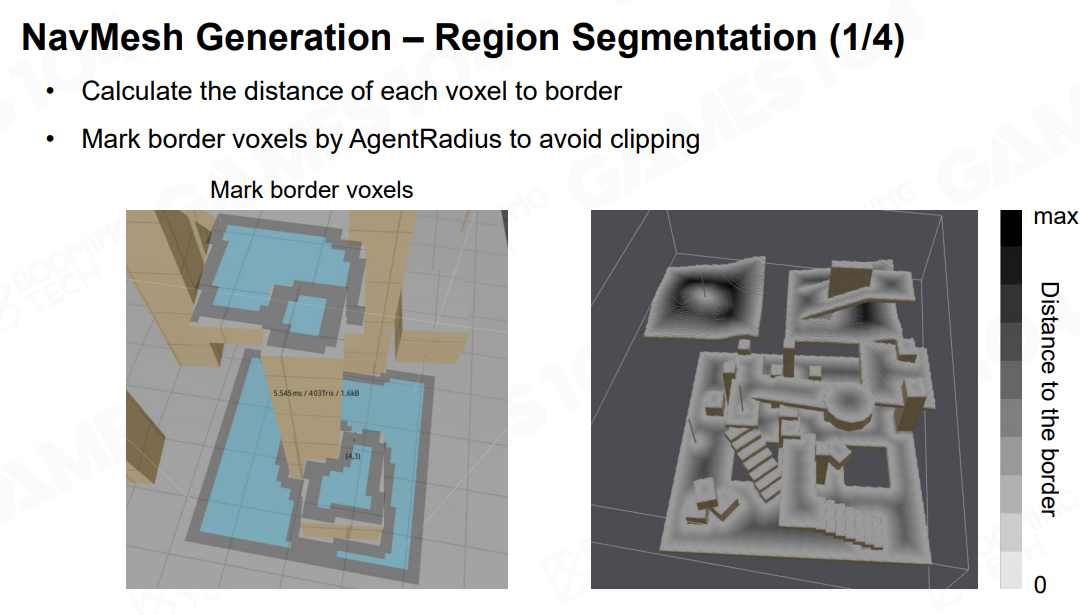
2.2.4 NavMesh的生成
- Voxelization 体素化自动生成NavMesh
库Raycast: 先让世界进行体素化生成各个Voxel,标记出能通行的区域,通过相邻的Voxel不能相差的方式找出。 再从所有的walkable voxel中找出所有的Edge,再按这些的Edge生成Distance Field 图,每个voxel找最近的edge,离edge的点最远的点找出,再从这个点向外扩散,以此形成 Distance Field,即距离场。更细节的处理,比如重叠的区域需要做剔除。
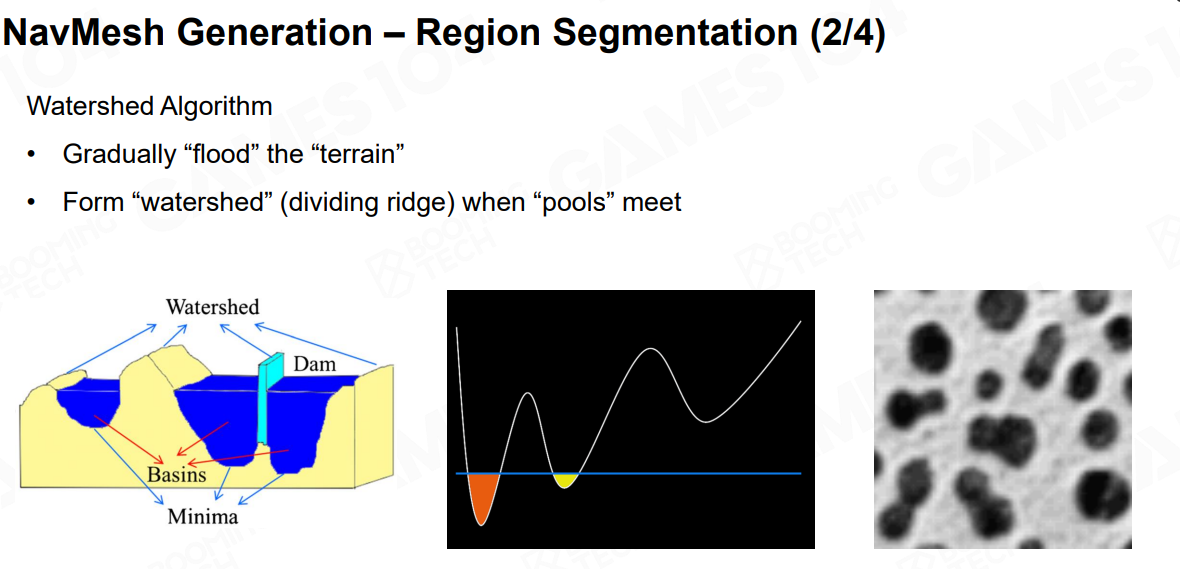
-
Region Segmentation
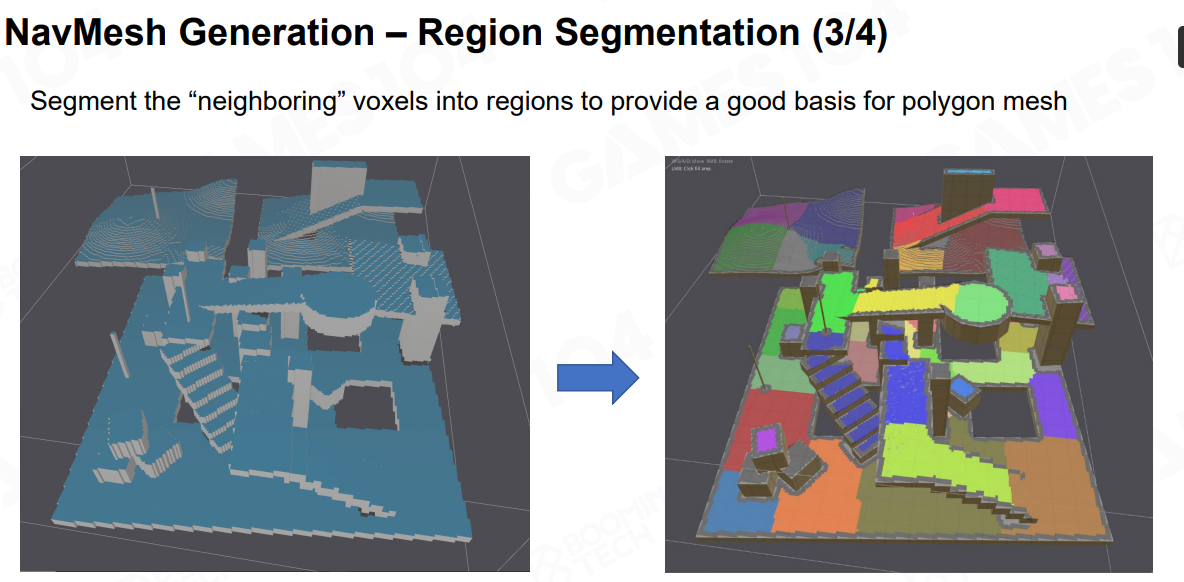
-
Mesh生成
通过 Region Segmentation生成 Mesh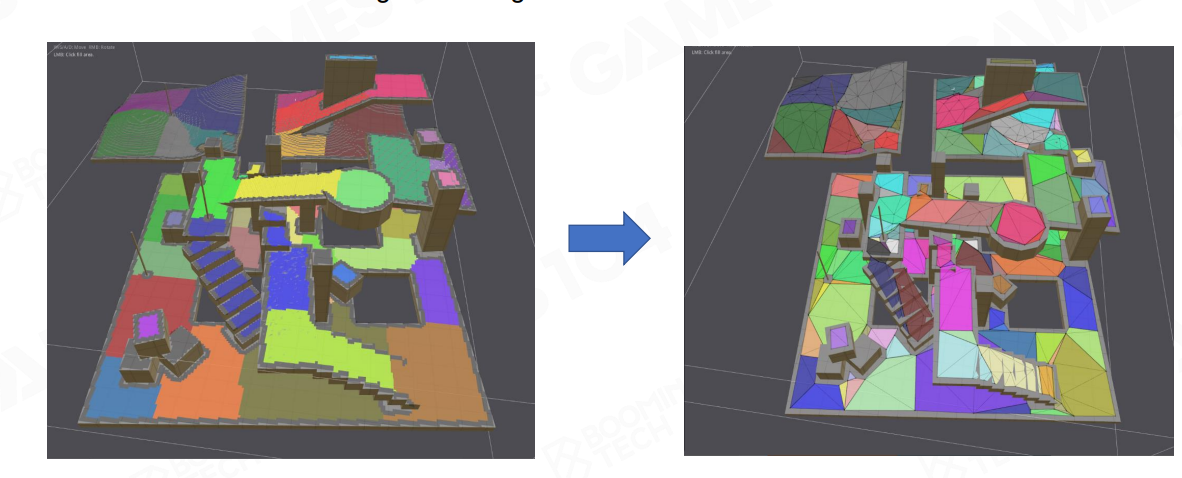
2.2.5 NavMesh的特性
-
为不同的地形标记NavMesh
如水面,地面,沙面等,对不同的地形发送事件以做不同的游戏逻辑处理 -
Tile
对于场景物体来说,运用NavMesh的特性,生成不同的Tile,而不是完全更新NavMesh -
Off-mesh Link
允许在不同的地形之间的特殊行为。 因为在基础的NavMesh不足的情况,需要手动建立不同地形间的连接线,实现地形间的穿梭
2.3 Steering
转向系统
分为三种行为:
-
- Seek Flee 目标转向 追寻一个目标的运动
追踪与巡逻。 输入:自己位置与目标位置 输出:加速度
- Seek Flee 目标转向 追寻一个目标的运动
-
- VelocityMatch 速度转向
追上目标的速度,当目标是静止和匀速时,较为容易,可由加速度公式求出,但如果目标的速度是不定时,需要在第一帧进行动态计算
输入: 自己速度,目标速度,匹配时间 输出:加速度
- VelocityMatch 速度转向
-
- Align 角度转向
与2类似,只是这里处理的是角速度的匹配。
输入:自己的角度,目标角度 输出:角加速度
- Align 角度转向
2.4 Crowd Simulation
群体(行为)模拟
2.4.1 模拟方法
-
- Microscopic Models - Rule-based Models 微观方法
预先为群体动态的个体制定一系列的规则来运动
- Microscopic Models - Rule-based Models 微观方法
-
- Macroscopic Models 宏观方法
宏观上设计全局的LINE,让群体是沿着LINE行走和运动,但不考虑个体之间和与环境之间的关联
- Macroscopic Models 宏观方法
-
- Mesoscopic Models
混合模式
群体分组,个体可以按1的Role,整体就有一个LINE的规则,如RTS游戏控制小兵。
- Mesoscopic Models
2.4.2 碰撞避免
Collision Avoidance
-
Force-based Models
影响人群行为的社会心理和物理力量的混合, 个人的实际运动取决于所期望的速度及其与环境有关相互作用, 且可以模拟逃离人群恐慌的动态特征
优点:适合人群模拟 缺点:与物理模拟类似,需要控制好模拟的步伐,以防模拟出错的情况 -
Velocity-base Models
基于速度障碍生成的碰撞检测
当两个物体要相遇时,会在速度域形成一个障碍,以让各自进行速度调整来避让碰撞。
根据周边物体的信息,在速度域上做出决定。
算法分类:
-
Velocity Obstacle (VO)
计算它自己的躲避速度,假设其他座席无响应
适用于静态和无响应的障碍
容易跑过头
可能会引起两个互相避让物体之间的振荡 -
Reciprocal Velocity Obstacle (RVO)
假设另一方正在使用相同的决策过程(相互合作)
双方都只走一半避免的碰撞的路
仅保证两个物体间的无振荡和碰撞避免的情况 -
Optimal Reciprocal Collision Avoidance (ORCA)
在2的基础上解决了群体的无振荡和碰撞避免的情况
2.5 Sensing or Perception
感知系统
2.5.1 分类
内部信息+ 外部信息(静态空间信息,动态空间信息,角色信息)
- 内部信息
自身的信息,位置,血量,武器状态等 - 静态空间信息
放置tactical(战略)点,让AI知道某些点可以做为更优的选择 - 动态空间信息
Influence Map + Sight Area(视角区域)
动态获取当前的游戏的信息或游戏行为变动或事件发出,以影响AI在战场上的行为。
Game Objects
动态获取场景物体的行为来影响 AI。
2.5.2 Sensing 模拟
1.空间中的光,声音, 气味
2.最大行驶距离
3.以不同的模式在空间和时间上衰减
视线被障碍物挡住
嗅觉范围会随着时间的推移而缩小
4.辐射场可以模拟传感信号
可以简化为影响图
该字段覆盖的代理可以感知信息
Sensing需要在引擎中设置开放的级别,以此控制对于性能方向的考虑和控制
2.6 Classic Decision Making Algorithms
2.6.1 分类
六大算法:
前向算法
• Finite State Machine
• Behavior Tree
• Hierarchical Tasks Network
• Goal Oriented Action Planning
• Monte Carlo Tree Search
• Deep Learning
2.6.2 Finite State Machine
状态机,两个状态通过一定的条件进行切换状态。
Transition + State+ Conditions
State过多时,整个网络的复杂度会比较复杂。
可以使用Hierachy FSM做为优化,但反应速度较慢,交互也会有问题。
整体来说:
维护复杂,更新修改State难,重用性较差。
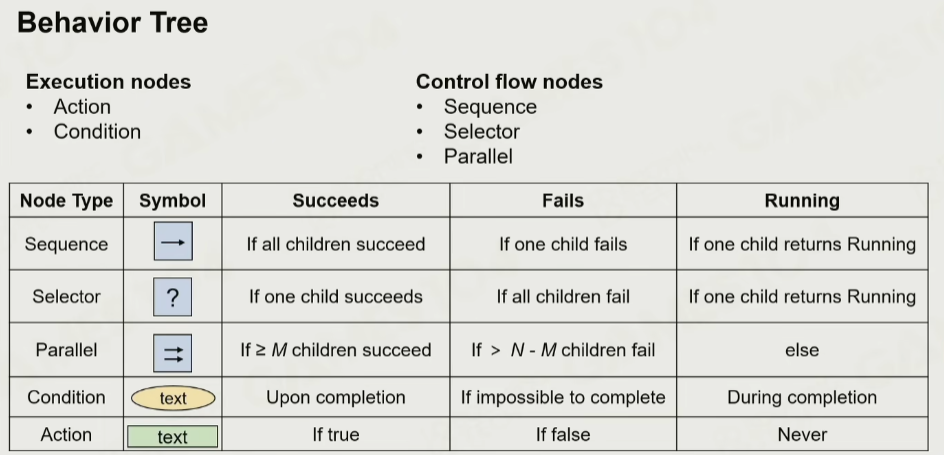
2.6.3 Behavior Tree
Decision Tree 决策树
用行为树来模拟出人类的思想决策
- Execution Nodes
叶子结点,也是行为结点,处理一个单位的行为。拥有Fail, Success, Running三种状态 - Control Nodes
条件结点, 通过返回结果去决定后面的流程的走向
Sequence: 从左往右(从上往下)依次执行子树,直达有结点返回Fail或Running, 返回,或者当所有的结点都成功,则返回成功
Select: 从左往右(从上往下)依次执行子树,直达有结点返回Success或Running, 立即终止并返回,或者当所有的结点都失败,则返回失败
Parallel: 逻辑上同时开始执行所有的子树,只要有任意M个子树执行成功,则返回成功,有N-M+1个结点失败则失败。 其他则返回Running
- 如何去Tick?
要想人思考一样,每次从root结点去Tick, 每层的树结点按固定的顺序去执行,每个结点都要有固定的返回。
从头Tick的可能会导致性能问题,这里的优化的方法可以是去以某些激活结点去执行,同时添加一些事件去让BT从头执行。但这只是一种变体且需要明确约定好规则和设计。
同时Running的结点可能有多个。
-
优化- Decorator
对于一个结点执行固定的几类动作, 如•循环执行 •执行一次 •计时器 •时间限制 •值修改器几种 -
Precondition
把条件合并到结点内,以简化BT的结构 -
Blackboard
BT的内存区,用K-V去存储数据,让行为树的结点去存取数据。 -
BT的缺点
每个TICK都从头就会有性能问题。交互条件越多就越多的消耗。
3. 高级AI
3.1 HTN 层次任务网络
Hierarchical tasks
人类的行为是有意图的,有一定的目标性的,有层次的完成最终的目标。当设计师在构建AI时,更多的希望AI完成某一件事。
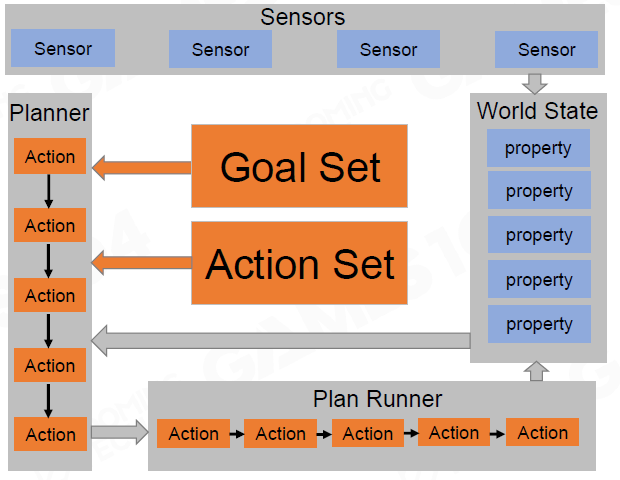
3.1.1 框架:
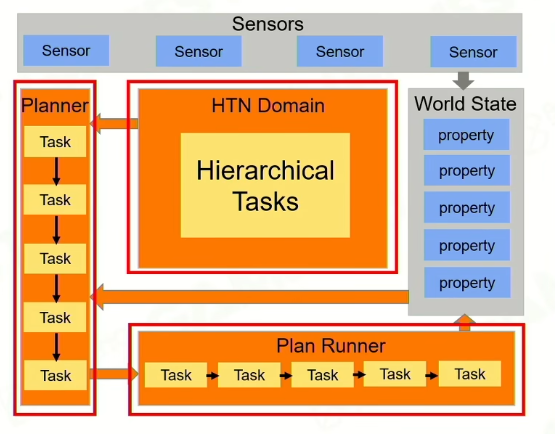
- World state: 包含一系列的属性,给计划者AI的一个状态。
- Sensors: 传感器,接收世界的变更来改变World state. Perception
- HTN Domain: 资源里加载进来,用于描述HT之间的关系。
- Planner: 从World State和HTN Domain中制定计划
- Plan Runner: 运行Plan,在任务完成后更新world state
3.1.2 任务:
-
- Primitive task: 原子任务
先决条件Preconditions: 是否可以执行 + world properties的值是否可以满足。
执行Action: 任务的执行内容
影响Effects: 任务的执行会对world state properties的影响。 如改变某个数值
- Primitive task: 原子任务
-
- Compound task: 复合任务
包含多个methods, 每个method有自己优先级和先决条件,类似于BT的Selector的设定,按优先级找到满足先决条件的method执行。
这里的method又会包含多个子的原子任务或复合任务,以此实现更加复杂的嵌套关系。
- Compound task: 复合任务
通过这种方式的构建AI,更符合人类的思维方式
3.1.3 HTN Domain:
以Root Task为基,设定好各个method:
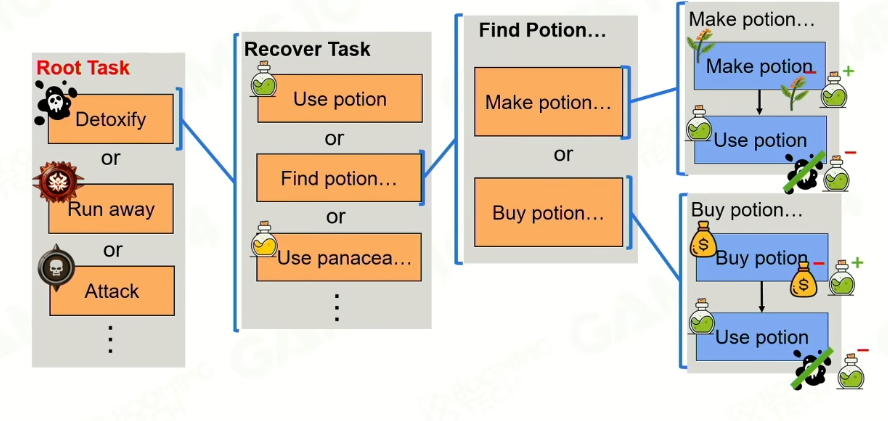
3.1.4 Planing:
第一步:
- 从Root task开始进入整个HTN。
- 按先决条件和优先级找到method
第二步: - 执行原子任务,如果不满足条件就找下个任务,没有下个任务了则直接往上层返回失败。
- 对于执行复合任务,解开任务内容,按先决条件和优先级进行执行
这里需要注意的是,复合任务在执行过程中会对world state进行一个副本拷贝,在执行中的任务假设为成功完成且修改到这块值。
不断的重复第二步以完成整个Plan的制定。
3.1.5 Run Plan:
执行结束: 有一个任务执行失败了。或者是所有的都执行成功了。
成功则更新world state数据,否则返回失败,进入Replan的过程
3.1.6 Replaning:
三种情况触发replan
- 当前闲置状态
- 当前plan结束或失败了
- 传感器响应触发world state变更
3.1.7 总结:
优点:
与BT很类似,同时更高级别的抽象
可以制定有长期影响的计划
比BT更高效率
缺点:
玩家的行为难以预测,导致任务容易失败
一些world state和任务的结果,对于设计者来说构建会有挑战性
3.2 Goal-oriented Action Planning(GOAP)
更加动态,backward planning而非forward
3.2.1 框架
- World State和Sensors: 与HTN类似
- Goal set: 目标集
- Action set: 行为集
- Planning: 一系列的行为计划
3.2.2 Goal set
目标集是由所期望的最终的达成一个状态组成。
每一个目标也可以表示为一系列的状态。
- precondition: 先决条件,决定选哪一个goal
- Priority: 决定从多个goal中应该选哪个
3.2.3 Action set
包含一系列的Action,这里的Action与HTN的原子任务类似。
但多一个Cost概念,其中表示这一个Action所需的消耗值,由开发者设定。
3.2.4 执行流程
- Goal Set中找到第一个执行的GOAL
- 从第一个GOAL里的precondition里的world state中,与当前world state比较,得出不满足的条件,放到Unsatisfied States列表中
- 从Unsatisfied State顶部取出一个state,从Action set找出可以得到此state的一个Action,如果找到了,则把这个state从unsatisfied State列表中取出,把Action加入Plan stack中。
- 从Plan stack中拿到此Action,检测他的precondition条件,如果不满足,同样执行2,3这两步。
最终的目标是清空Stack of Unsatisfied States.
3.2.5 Build States-Action-Cost Graph
把GOAP转化为图的问题。 构建为有向图。
图的结点:连接的各个States, 是一组state的condition值
图的边:Action
图的距离:Cost
核心的问题: 从Goal到当前状态的一条最短路径!
使用A算法解决,这里的启发函数可以使用unsatisfied states的个数。 但A并不保证找到最优解。但这不影响,实际上AI也可以更灵活
3.2.6 总结
优点:
目标与行为分开了,较HTN更加灵活,同时HTN也容易犯precondition/effect不匹配的错误
缺点:
较BT/FSM/HTN来说,消耗更大了,计算更慢。
也需要一个很好的制定world state和action effect
3.3 Monte Carlo Tree Search
蒙特卡洛树搜索
2006年由Enrico Fermi 提出的方法,第一个要解决的目标就是围棋。
把问题抽象成数学模型,因为计算机只能处理数学模型
3.3.1 模型
- State: 当前的状态,通过一个node表示
- Action: AI的一步操作,表示为一个edge
- State Transfer: 从一个State到另一个State的Action
- State Space: A Tree Structured State Space。 一系列通过action与current state连通的states集合。根结点就是current state
整个模型的输入就是current state,构建出State Space, 输出就是从这个State Space中找出从current state 到best state的
3.3.2 模拟
-
模拟
根据默认策略从状态节点运行以产生结果 -
以围棋为例
从状态中随机移动直到游戏结束
根据结果返回1(赢)或0(输) -
默认策略
有意义但快速的游戏规则或神经网络
3.3.3 对于state的评估
评价因素
•Q:模拟结果的累积
•N:模拟次数
评估的因素: Q/N
3.3.4 反向传播 Backpropagate
对于当前模拟失败时,不仅仅要改自己的Q/N值,自己的父结点也要依次往上调整。 这样做了足够多的模拟时,所有探索过的结点都会有一组数据。
3.3.5 迭代步骤
选择: 选择最有希望的“可扩展”节点 (most urgent “expandable” node)
展开: 通过选择操作展开树
模拟: 从新节点进行模拟并产生一个结果
反向传播: 从新节点反向传播模拟结果
3.3.6 选择 Selection
-
“expandable” node:
未探索完的结点 -
Selection
Exploitation: 开发型的
寻找有前景的领域
选择Q/N值较高的子节点 -
Exploration: 探索型的,选择N值较小
查看尚未充分采样的区域
选择访问次数较少的孩子 -
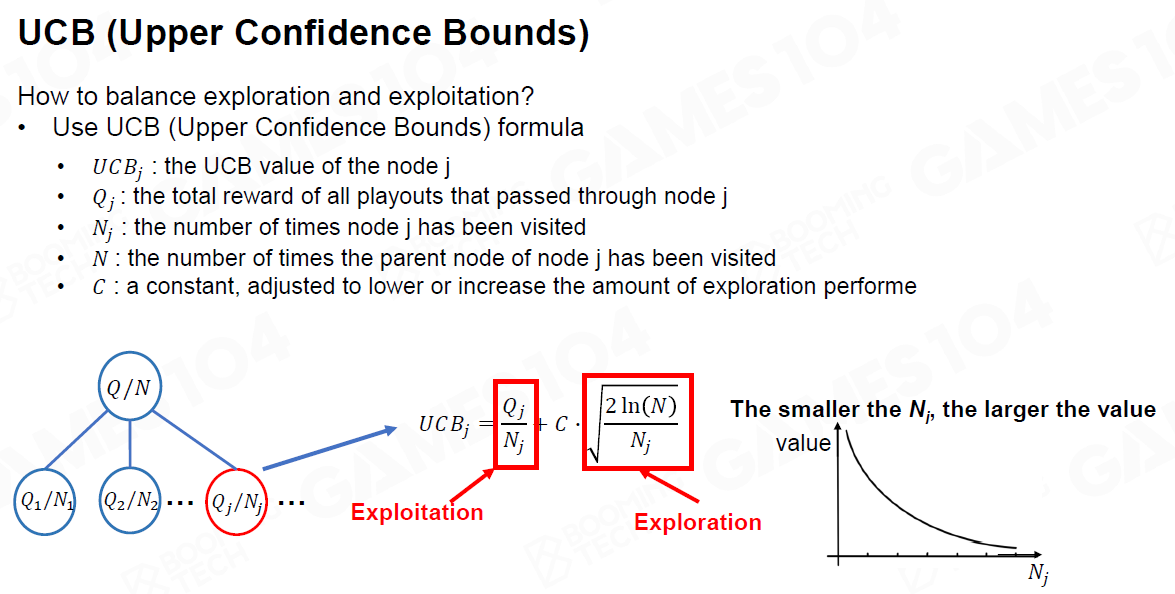
如何平衡勘探与开发?
使用UCB (Upper Confidence Bounds)公式
𝑈𝐶𝐵𝑗:节点j的UCB值
𝑄𝑗:通过节点j的所有播放的总奖励
𝑁𝑗:节点j的访问次数
𝑁:节点j的父节点被访问的次数
𝐶:一个常数,调整以降低或增加探索执行的数量
-
如何选择最紧急的可扩展节点?
始终从根节点开始搜索
查找当前节点UCB值最高的子节点(有希望的子节点)
设置有希望的子节点为当前节点
重复以上步骤,直到当前节点是可展开的。设置当前节点为所选节点 -
扩展
根据可用的操作,将一个或多个新的子节点添加到选定的节点
子节点的值未知 -
基于扩展,模拟和反向传播
-
结束条件
- 设定内存大小以结束
- 设置计算时间
- 如何选择最好的招式?
当前状态节点的“最佳”子节点
Max child: 选择Q值最高的root child
Robust child: :选择N值最多的根节点
Max-Robust子: 选择访问次数和奖励最高的根子。如果不存在,则继续搜索,直到达到可接受的访问数
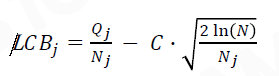
安全子: 选择LCB(Lower confidence bound)最大化的子
3.3.7 总结
优点:
MCTS代理行为多样
Agent完全由自己做出决策
可解决搜索空间大的问题
更加适合于回合制,结果比较明确的游戏结果
缺点:
对于复杂的游戏情况,如大多数即时游戏都很难设计动作和状态
很难为大多数实时游戏建模
3.4 Machine Learning Base
3.4.1 分类:
Supervised Learning: 监督式的学习
Unsupervised Learning: 非监督式的学习
Semi-supervised Learning: 半监督式的学习
Reinforcement learning: 强化学习
3.4.2 Supervised Learning
给定一些样本,从样本式学习,让机器可以进行识别。
3.4.3 Unsupervised Learning
从无标签的数据中进行学习,进行分类操作。
3.4.4 Semi-supervised Learning
半监督式的,给定一系列的无标签数据,并加以做好标签的样本进行学习。
3.4.5 Reinforcement learning
强化学习,从与环境的交互过程中学习
强化学习(RL)是机器学习的一个领域,研究智能代理在环境中应该如何采取行动,以最大化累积奖励的概念
- 试错法搜索 Trial-and-error
学习者必须通过尝试来发现哪些行为能产生最大的回报 - 延迟奖励
行为可能会影响即时奖励、下一个场合和所有后续奖励
3.4.6 Markov Decision Process
马尔可夫决策过程
- 基本元素:
- Agent 代理
学习者和决策者 - Environment 环境
与代理交互的对象,包括代理外部的所有内容 - State
Agent的观察,数据结构是人为设计的状态 - Action
行动是代理在游戏中所能表现的最小元素 - Reward
从环境传递到代理的每个时间步骤中接收的特殊信号
- Mathematical Model 数学模型
Probability of transition: 概率函数, 在采取行动a后,从s到s‘的转换概率
Policy: AI系统的核心,类似于transition,policy也是一个随机变量。 AI的核心优化也是Policy, 无论是用神经网络还是
Total reward: 从长远来看,它所获得的累积回报。 但是由于有一定的概率性,所以这里乘上一个系数。𝐺𝑡=𝑅𝑡+1+𝛾𝑅𝑡+2+𝛾2𝑅𝑡+3+⋯ 这个系数平衡短期目标和长期目标,系数调大就是更偏向短期。
3.5 构建高级游戏AI
在游戏AI中使用Machine Learning概率
AlphaStar是DeepMind开发的一个电脑程序,可以玩电子游戏《星际争霸2》
3.5.1 DRL example
Deep Reinforcement Learning 深度强化学习, 需要定义如下概念:
- State: 地图 + 游戏统计数据 + 各个单位实体 + 玩家数据
- Action: 抽象化出来的行为, what+who+where+when
- Reward: 奖励机制。 对于AlphaStar的方法直接获得的奖励+1/-1,配合以伪奖励输出与评论网络,范围控制在+1/-1以匹配直接奖励。 不同的奖励设定能帮助训练不同类型的agent,类似于“性格特征”。
- NN design: neural network 神经网络,根据游戏的结构和逻辑,构建NN和网络选型
- Trainning Strategy: 训练策略
3.5.2 NN
-
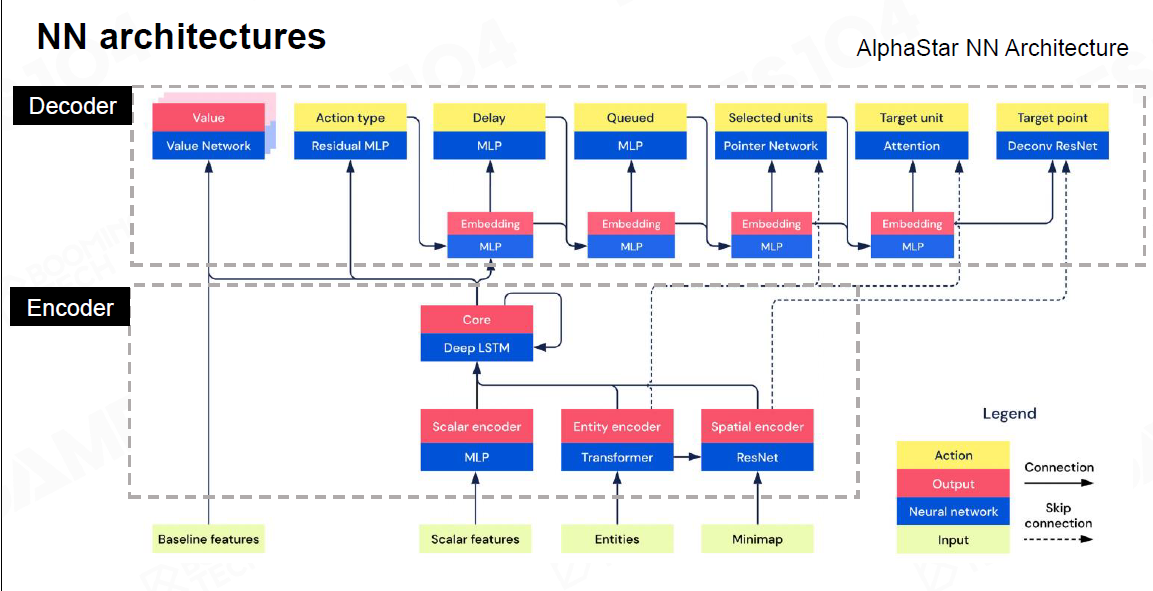
整体结构- AlphaStar
最下方的数据,往上放到不同的神经网络上,最终encode形成一个AI角色
Decoder: 把结果翻译为人类可理解的行动
-
MLP Multi-Layer Perceptron 多层次感知器
对于定长的数据,最简单的多层神经网络。给一个输入就有一个输出。 -
CNN Convolutional Neural Network 卷积神经网络
如结构上的ResNet, 主要针对图像的识别,游戏中识别出哪里有角色(怪物或者敌方)。 -
Transfomer
用于处理大量的时间上不定长的数据,持续处理变长的变量 -
LSTM Long-Short Term Memory
像人类一样的思考,这里主要是使AI记录或删除旧的数据。 结构上,汇总上述三个网络处理完的数据。 -
NN Architecture Selection
对于各类数据的选择,如定长数据使用MLP, 不定长使用LSTM,Transformer, 图像数据使用ResNet,Raycast或Mesh数据。
3.5.3 Trainning Strategy
- 使用Supervised Learning,先让AI模仿人类,当然首先得输入AI大量的数据。
- Refeinforcement Learning
- AlphaStar的方式:Self Play & Adversarial
- Main agents MA:
目标: 成为最健壮和输出
35%与自己打,50%与各过去的agents打, 15%跟过去的MA打 - League exploiters LE:
目标: 发现过去所有代理(MA, LE, ME)的弱点
与所有过去的代理商(MA, LE, ME)的对抗 - 主要剥削者[ME]
目标:发现当前MA代理的弱点
针对当前的MA代理
3.5.4 RL与SL
-
SL: 监督式学习
需要高质量的数据,有时也需要更明确的行为
行为更像人类,但但可能不会超过人类专家数据, 往往也会有数据不足的问题 -
RL:强化学习
强化学习通常被认为是最优的解决方案, 但RL model是困难的,而且算力的消耗较大,算出来的行为可能是不自然的。 -
如何选择: 如果奖励是足够密集的,用增强学习RL更易训练出好AI, 如果一个动作与奖励关联不直接,使用RL更难,SL则更适合。
-
Hybrid: 全局观
机器学习是强大的。但的确比较昂贵。例如,deepmind花费2.5亿美元来完成alpha star,而复制需要1300万美元, 我们经常需要权衡DNN在类人点上的位置(整个战斗的一部分)。
因此在适当的场合,可以组合各种策略来制作AI。
4. 网络 - 基础篇
4.1 概述
基础篇
- 网络协议
- TCP, UDP和可靠UDP
- Clock Synchronization
- 远程过程调用(RPC)
- 网络拓扑
- 游戏同步
- 快照同步。
- 帧同步。
- 状态同步。
4.2 网络分层
Application 层
•Provides functions to users
Presentation 层
•Converts different representations
Session 层
•Manages task dialogs
Transport 层
•Provides end-to-end delivery
Network 层
•Sends packets over multiple links
Data Link 层
•Sends frames of information
Physical 层
•Sends bits as signals
4.3 TCP 与UDP
4.3.1 相关概念
TCP: 特点:
•Connection-Oriented
•Reliable and Ordered
•Flow Control
•Congestion Control
包头10个字节。
前面的操作如果没发出去,后面的消息就不会发。
UDP:特点:
•Connectionless
•UnReliable and Unordered
•NO Flow Control
•NO Congerstion Control
包头只需4个字节,更小。
- Positive acknowledgment (ACK) 信号: 在通信过程中,接收方向发送方发送的信号,表示已经正确地接收到数据。
- Negative ACK (NACK or NAK) 信号: 在通信过程中,接收方向发送方发送的信号,表示先前接收到的数据存在问题或出现了错误
- Sequence number (SEQ)是一种计数器,用于跟踪由主机发送的每个字节。
- Timeoutsspecified 是指在通信过程中等待接收方的确认信息的时间,如果在规定的时间内没有接收到确认信息,发送方会认为通信出现了问题,可能会尝试重新发送数据或采取其他措施来解决问题
4.3.2 如何构建一个游戏里使用的网络协议
首先:对于游戏来说: 需要使用UDP,但又需要TCP的一些特性:
•Keep-alivedconnection (TCP)
•Need keep logic consistency in “order” (TCP)
•High responsive & low latency (UDP)
•Broadcast commonly used (UDP)
在彼此不可靠的链接下,怎么建立一个可靠的通信
-
可靠性:(Auto Repeat Request)ARQ的策略:
•Stop-and-Wait ARQ 停止等待每个窗口返回
•Go-Back-N ARQ 检查到如果哪个丢了,就返回到对应窗口进行重传
•Selective Repeat ARQ 接收者每帧发送ACK,当接收者收到破坏的包时,将发送nack,发送者将重新传 -
错误修正:在丢包的情况下让UDP变得可靠
- Forward Error Correction
算法1: XOR FEC
可以处理较小的丢包率
利用异或校验位的特点,额外在FEC Layer里存储异或位。
在二进制位上,如果两者不一样才会返回1,否则返回0。
C= A xorB |
对于ABCD四个包传输时,额外传输一个E,E里存储异或值,这样在丢失一个包时,可以通过异或的特点自动找回。
算法2: Reed-Solomon Codes(RS码)
构建的一个矩阵,中间任意抽掉若干行之后,还是一个可逆的矩阵,这样拿到信息后只需要乘上抽掉行后的矩阵的逆,就可以得到修复的数据。
-
实时性:
•Smaller RTO growth
•No congestion control
•Fast retransmission mechanism
•No delay ACK -
灵活性:
灵活的设计协议
UDP和TCP混合使用
4.4 时钟同步
RTT: Round Trip Time
发送/接收 delay,传输 delay, 服务器响应时间
与PIng值不同,ping更偏向于传输层,RTT则是应用层级别。
与Latency对比,latency表示一个trip来回的从发送到接收的所需时间
NTP算法:

对于游戏引擎时同步时,第一步需要把时针对上:
Stream-Based Time Synchronization with Elimination of Higher Order Modes:
(SHM)是一种时间同步算法,主要用于无线传感器网络中的节点之间时间同步。SHM算法通过采用相邻的时间差进行时间同步,并通过消除多项式高阶模式来提高同步精度。下面将详细描述SHM算法的实现过程。
- 首先进行一些N次NTP算法校准。
- 把N次NTP结果中的RTT过大的样本去除
- 再用2的结果的平均值,再进行一次NTP校准
4.5 Remote Procedure Call(RPC)
RPC的基本思想是在客户端和服务器之间建立一个虚拟的通道,使得客户端对远程服务器中的过程调用就像本地过程调用一样简单。
RPC是一种简单而实用的远程过程调用协议,可以在不同的计算机上执行远程调用,使得客户端对远程服务器中的过程调用就像本地过程调用一样简单。RPC被广泛应用于分布式系统、云计算、微服务等领域。
-
定义接口
在客户端和服务器之间进行RPC调用之前,需要定义接口(即服务契约),包括要调用的方法的名称、参数和返回值类型等。接口通常使用IDL(接口定义语言)进行定义。 -
序列化和反序列化
在RPC调用期间,客户端将请求参数序列化为字节流,然后通过网络传输到服务器。服务器收到请求参数后,将其反序列化,并根据请求参数执行相应的过程调用。同样地,服务器将返回值序列化为字节流,并通过网络传输到客户端,客户端收到返回值后将其反序列化。 -
远程过程调用
客户端通过调用本地代理方法来发起RPC调用。代理方法将调用信息打包并通过网络发送给远程服务器,服务器收到调用信息后执行相应的过程调用,然后将结果返回给客户端。 -
协议栈
RPC的实现需要一组协议栈来支持基础通信功能,包括传输层协议(如TCP、UDP)、网络层协议(如IP)和数据链路层协议(如Ethernet)等。
Interface Definition Language(IDL)是一种用于定义软件组件接口的语言。IDL通常用于分布式系统、远程过程调用、CORBA等场景中,可以帮助开发人员定义清晰、可扩展和跨平台的接口。下面将详细描述IDL的主要特点和应用场景。
RPC Stubs:是在客户端和服务器端之间进行通信时生成的代理程序,主要用于隐藏远程过程调用的实现细节,使得客户端对远程服务器上的过程调用就像本地过程调用一样简单。
使用Stub Compiler
4.6 Original Peer-to-Peer(P2P)
-
早期对战游戏的网络
现在多人已经少用了,一般用于点对点两位玩家来做 -
P2P with Host Server
玩家做为一个服,创建局域网
早期的如CS,魔兽等局域网对战
- 好处: 不依赖服务器
4.7 Delicated Server
有一个核心的服务器,更加的有权威性,能更好的模拟游戏世界 ,但需要更高的性能需求
对于网速有要求的情况,如RTT(网络回路) 过高,则可以建立更高速的链接来处理
4.8 Game Synchronization
游戏同步:
单机:对于一个玩家(单机)的游戏来说, 只会如图中的流程:

联网:
引入如何去同步的问题呢?
- Snapshot
古老,Quake时代就有, 客户端把输入发给服务器,服务器把所有状态生成快照发给各个客户端。客户端根据服务器的快照进行同步。
优点: 所有的状态和表现都是高度一致的。
缺点:快照的成本较高,这时服务器的帧率就要限制一下。客户端的算力被大量浪费,同时数据量随时游戏逻辑越复杂而变得巨大。
为了性能考虑,往往需要在快照之间添加差值来节省性能。
-
Lockstep
帧同步 -
优点:对于动作打击感要求高的游戏。 比较好做游戏录屏
缺点: 同步问题,断线重连时回溯模拟tick会较为麻烦
- State Synchornization
用于MMOARPG游戏
最核心的思想是,实际上不会把世界所有进行同步,而只是将需要的同步,但在server端会进行全世界的模拟,只把表现相关的同步到客户端。 因此防作弊的能力也会较好一点。
核心组件: Authorized -> Server -> Replicated . 玩家到服务器再到复制者

-
帧同步与状态同步对比

5. 网络 - 高级篇
5.1 概述
- Character Movement Replication 角色移动同步
- Hit Registration 如何在网络情况下打中敌人
- MMO 游戏的网络架构
- Bandwidth 带宽优化
- Anti-Cheat 防作弊
- 构建开放世界的基础构架
5.2 角色移动同步
问题:
角色1移动到点A, 点A再同步到服务端,服务端到同步给角色2。
这时点A在角色2的显示位置应该延后了!
解决方案:
Interpolations 内插值和 Extrapolation 外插值

5.2.1 内插值
- 收到服务端的数据时,不立即渲染
- 数据记录下来,等待新的数据包
- 等一个时间的offset后,开始渲染第一个数据包的位置
- 生成一个插值offset加到第一个数据包的位置上

优点:
本地看到对方的移动是比较平滑(实际上如果对方就是不平滑的移动,这时表现反而是平滑的)
缺点:
一定会加剧延迟的问题
authroized端一定比服务端快,如果出现两个authroized端相互对撞的情况,两端得到的结果是不一定的!
可能会与物理表现不符,但确保了位置不会出现一些奇怪的点
游戏类型: FPS MOBA
5.2.2 外插值
假设对latency一定,对未来做一个估测。 虽然没有收到信息包,但已经预判了。
- Dead Reckoning 算法
从当前的位置预测未来的位置
Projective Velocity Blending
- 收到与P0’ 的位置 与原预测的P0 不同时,使用PVB算法,算出 DR的Pd的位置
努力让红线往绿线靠

- 碰撞-与物理引擎交互
比较典型的如赛车游戏
由DR预测到碰撞时,先将控制权转给物理引擎,再经过一段时间后返回给DR。以此尽量让不同的客户端表现一致,但实际上不同的网络环境可能还是不一样。
适用游戏类型: 重物理学规律的。 如开船,赛车类游戏
5.3 Hit Registration
网络游戏中的命中判定。怎么让击中信息互相对齐。
实际上并不能完全解决,需要让所有玩家达成一个共识。
由客户端决定: Hit Detection - 如PUBG, Battlefield3(世界非常复杂)
由服务端判定: Hit Registration - 如CSGO
5.3.1 Hit Detection - 客户端检测
- 客户端看到的位置在哪来决定,因此往往手感较好。玩家看到什么就能打中什么。
- 将打中的结果发给服务端,服务端校验是否正确。
如何校验? 服务端取Hit点,是否在一个范围,在守望先锋中,直接给一个较大的带被击方的范围,只要在这个范围就算击中。
优点:高效地减轻了服务端的Hit负载,手感好。
问题: 网络包被破解就会被作弊。
5.3.2 Hit Registration
如果Hit完全由服务端判定,则基础的问题是可能永远打不中。这时就引入了 Lag Compensation 延迟补偿。
- Lag Compensation 延迟补偿

实例:如果网络波动是稳定的,在对焦过后,这样基本的稳定的。

问题:对于射击游戏来说,网络延迟的情况下,往往优势方在开枪方手上。
- 前摇
解决服务端同步的问题,对于动作游戏也可以加一些前摇机制。
5.4 MMO 架构

5.4.1 连接层
Login Server: 先连一个Login Server,验证账号密码。
Gateway:这里能把内外网隔绝,就是一个防火墙。
5.4.2 大厅层
 wechat
wechat alipay
alipay